I originally thought I might be able to re-purpose the motors from the appliances for the robot, but it turns out that anything that plugs into the wall runs off of mains supply, which in the United States is 120V. The highest voltage battery I would possibly use for this robot is probably an 18V drill battery, so I won't be able to use a motor that needs much more than that. It is possible to increase voltage between the battery and the motor using an electrical component called a transformer, but transformers that can increase voltage from 18V to 120V don't seem to be commercially available and at this point I'm thinking it might not be worthwhile to try to hunt one down and figure out how to use it.
My next thought was that some of the appliances might have motors that actually run off lower voltages, and have circuits that step down the voltage for them. So I opened up one of the mixers to check it out.
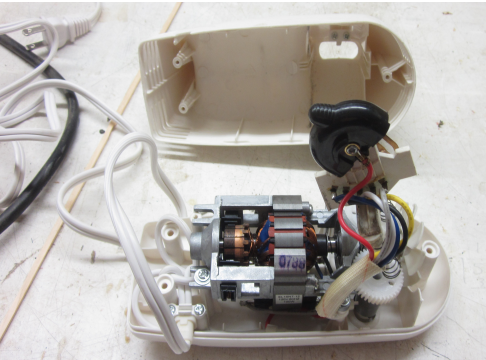
The motor inside the mixer was labeled as being rated for 120V, so no luck there.
I also took apart the blender. There was a weird triangular screw holding the bottom on, and I couldn't get it off with a flathead screwdriver, so I drilled out the screw. Companies usually use unusual screws like that when they want to keep people from opening a device- if you can't open a device, you can't repair it and you have to either buy a new one or pay to have it repaired by a professional.

The blender motor doesn't seem to be marked with the voltage it takes, and there's a small circuit board inside that could potentially be lowing the voltage. It seems unlikely that it would lower the voltage by much, when they could instead use a motor that is suited to mains voltage, but I'll take a closer look at the circuit over the next week and hopefully be able to talk about that in my next update.

 |
| Top: Disassembled blender; Bottom Left: Blender circuit; Bottom Right: Blender motor |
When I bought the toy truck, I thought it was just a basic toy with no electrical components, and I thought I might be able to use the wheels or the jointed arm for something. When I got home and started looking at it more closely, I saw that it has a battery compartment. I put in three batteries and tried flipping the on/reset/off switch and moving the knobs, but nothing happened. So I opened it up, in the hopes that I might be able to figure out what was broken, or at least salvage some electrical parts.


The truck has a speaker, a small motor that turns the arm in the truck bed, an adorable little gearbox, and a bunch of LED lights. It also has some kind of little switches that look like they're supposed to be triggered by the doors opening and closing.
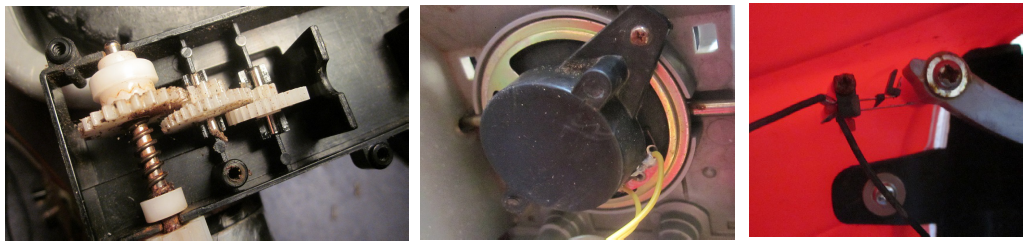 |
| The gearbox (which was full of mud), the speaker, and the switch that's triggered by the truck door. |
One of the leads on the motor was broken. I'm not sure if that's what was wrong with the truck (it seems like some of the other functions should still work, even if the motor was disconnected), or if I accidentally broke it while taking it apart. I'm going to solder the connection back together, and see if it works any better then. If the truck still doesn't do anything, I'm going to try putting the batteries back in, switching it on, and measuring voltage and current through various parts of the circuit and see if I can diagnose anything.
I did some internet research on metal detectors this week, and found a ton of different DIY metal-detecting circuits from various websites. I learned that the search coil of a meal-detector (contained in the disc at the end of the handle) is the part that controls what you can detect. The search coil is a coil of wire, usually enameled copper. The larger the circumference of the coil, the deeper it will be able to search. However, as the coil gets larger, it becomes less sensitive and loses the ability to find small objects like coins. I'll experiment with different size coils once I figure out what circuit to build. I think it could be cool to have two search coils on my robot (one to look for small objects near the surface, and one to look for larger objects deeper down). I suspect that the coils might interfere with each other, but since I'll be making a couple different sizes of coils anyway, it's worth a try. I also learned that enameled copper is what they use in motors, so even if I can't use any of the appliance motors as motors, I can at least cannibalize them for wire.
 |
| Image Credit: http://phandroid.com/2009/05/03/android-metal-detector/ |
I went to the beach on Sunday, and brought my dad's old metal detector. It has a pretty small range- it was able to detect a ring of keys from two or three inches above. I walked around the beach for 20 minutes or so, and didn't find anything. I learned that you have to keep the search coil close to the ground, almost skimming the sand, since it has such a short range, and that people usually sweep it back and forth as they walk, so that they search more area per distance traveled, which are both important things to keep in mind as I design the robot. There were a lot of people at the beach, and I started thinking that if the robot is going to run autonomously (or semi-autonomously), it will need to be able to avoid crashing into people and their stuff. I saw a tutorial a couple weeks ago on how to build an obstacle-avoiding robot using Arduino and an ultrasonic sensor, so I will probably end up adding obstacle-detecting capability to my robot.

While I was walking around with the metal detector, I also started thinking about whether it would be better to build a wheeled robot or a walking robot. I've only ever worked with wheeled robots, so that's definitely more in my comfort zone. However, I know wheels tend to get stuck in sand (this site gives a particularly thorough explanation of how to drive in sand to avoid getting stuck, and the gear you should bring to help extract your vehicle when it does). I think this risk can be limited by keeping the robot light and using wheels with a large surface area, but it might by easier and/or more effective to build a four- or six-legged walking robot. Since it would pick up its feet, it would be less likely to get itself stuck. On a related note, these researchers at Georgia Institute of Technology, Northwestern University, and the University of Pennsylvania built a walking robot that can travel at almost one foot per second. They said that when they programmed the robot's legs to move faster, it got stuck in the sand, so they had to find the maximum speed that allowed it to actually move.
In other news, my team competed in an off-season event at the San Diego County Fair on Saturday! We placed last (out of a total of eight teams), but we had a blast. Out underclassmen were driving and this was their first competition as drivers. By the end they were doing pretty well, but there was definitely a learning curve. We also got to show off our robot and talk to passersby about FIRST- one man I talked to was at the fair with his daughter, and they were really excited. They had tons of questions about the competition- in the father's words, "I'm such a geek aobut this stuff- building a robot like these, I wouldn't even know how to begin, but it's just so cool." He said they would stay and watch a match, and then they ended up staying until the end of the competition. Part of FIRST's mission is "To transform our culture by creating a world where science and technology are celebrated," so I thought it was really cool to have someone who's not an engineer stop by with his daughter and get so excited about the competition.
 |
| Left: Grace drives, while Matt coaches and Otto feeds the robot totes. Right: Our bot, 3255, lines up with the feeder station. |
No comments:
Post a Comment